R&D POC: Building a Drone Fleet Telemetry System with Unreal Engine & n8n (POC)

The Objective: To engineer a scalable "Black Box" telemetry system that bridges the gap between simulation (Unreal Engine) and workflow management (Jira) without relying on monolithic backend code.
The Architecture: I designed an Event-Driven Architecture where the simulation acts as an IoT edge device:
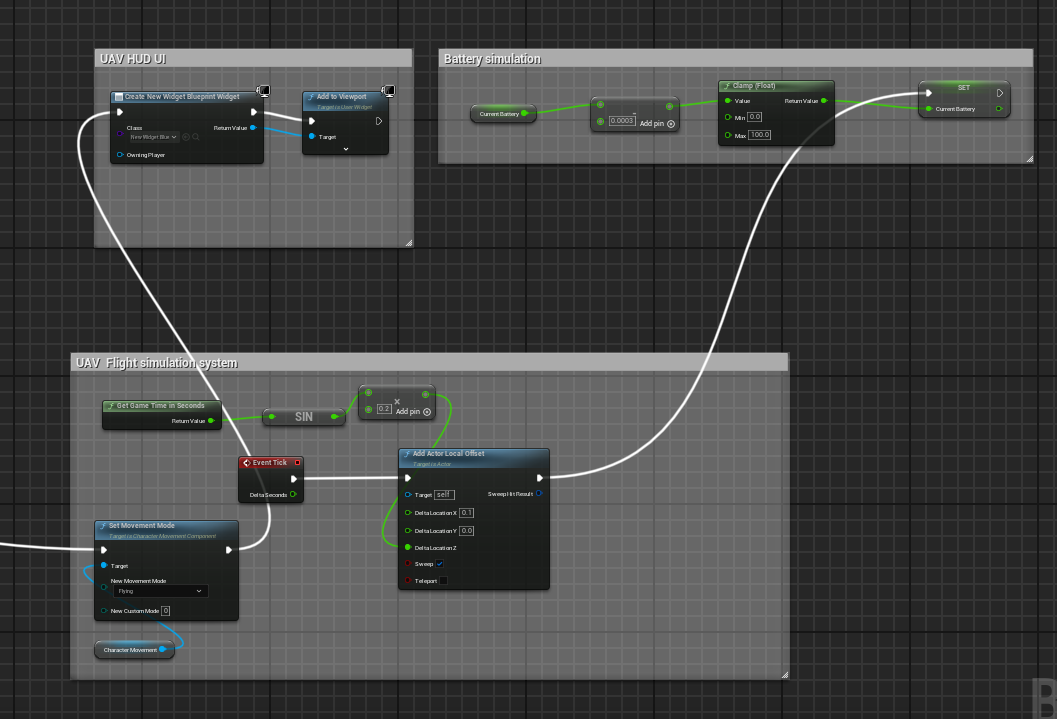
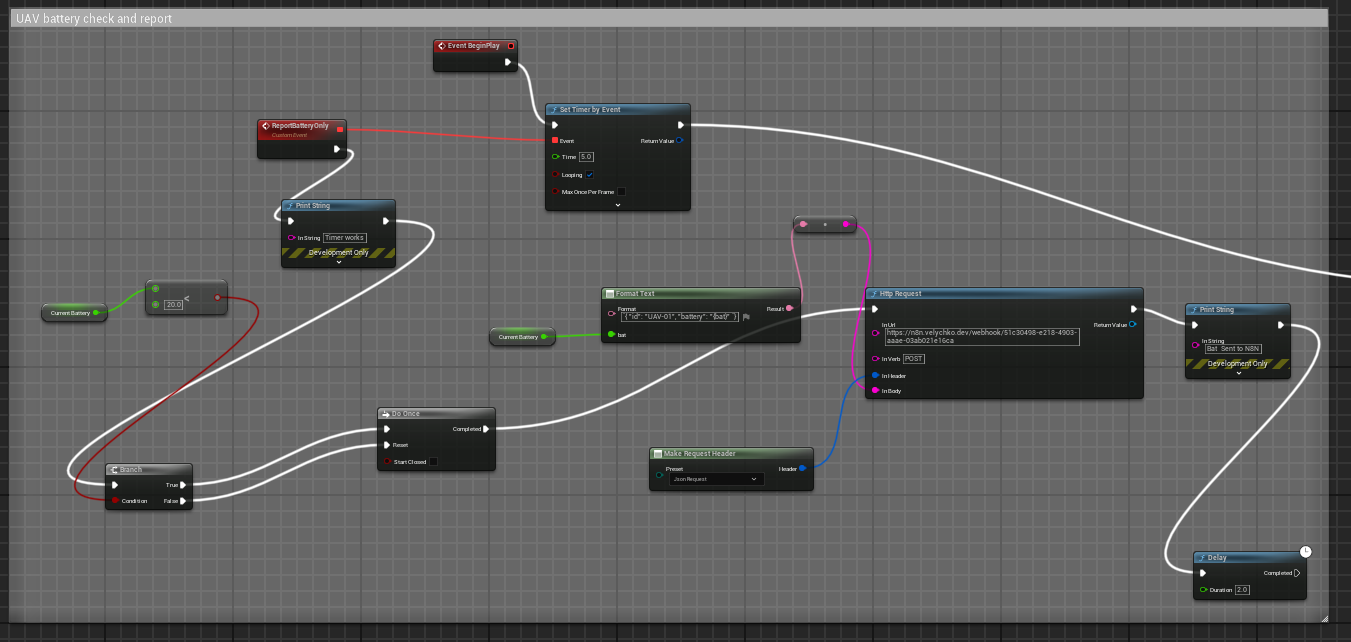
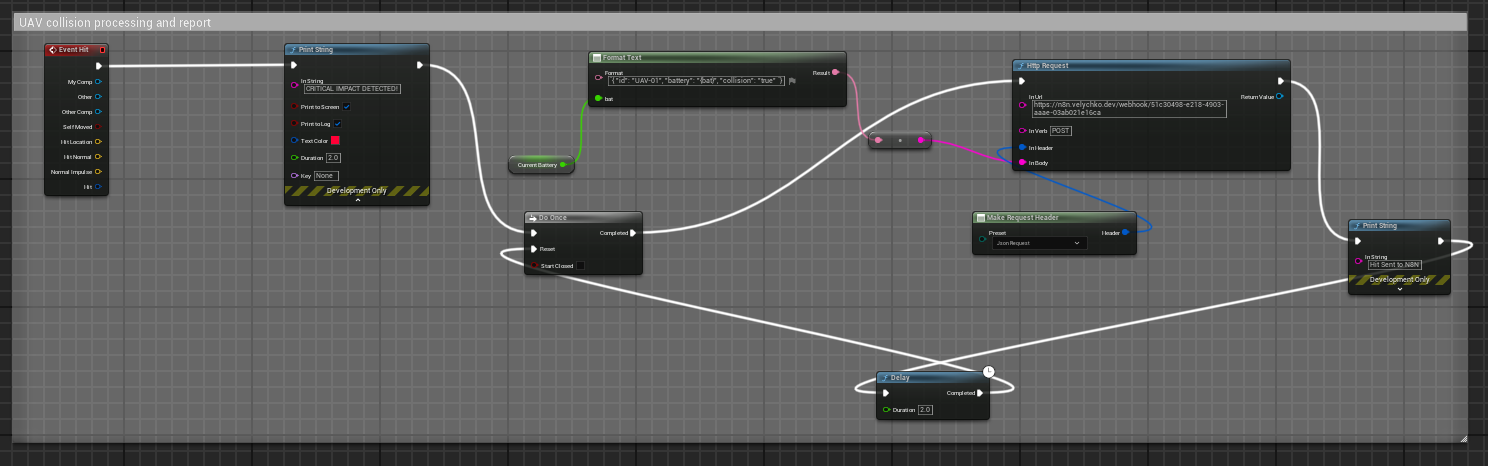
- Telemetry Source (UE5): Simulates 6-DOF flight physics. I utilized the HTTP subsystem to serialize telemetry data into JSON and fire async POST requests upon specific state triggers.
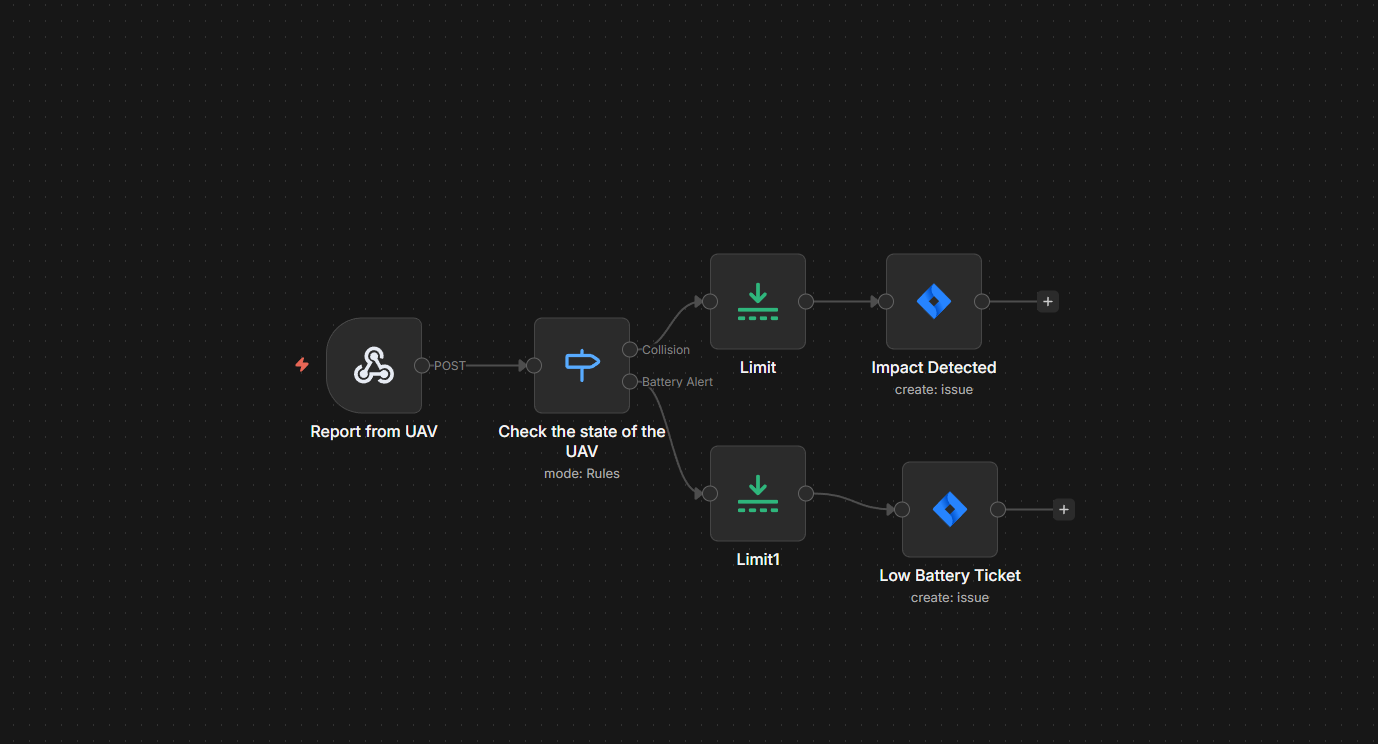
- Orchestration Layer (n8n): Serves as the middleware to ingest raw Webhook payloads. It parses the JSON and executes conditional routing logic (triage).
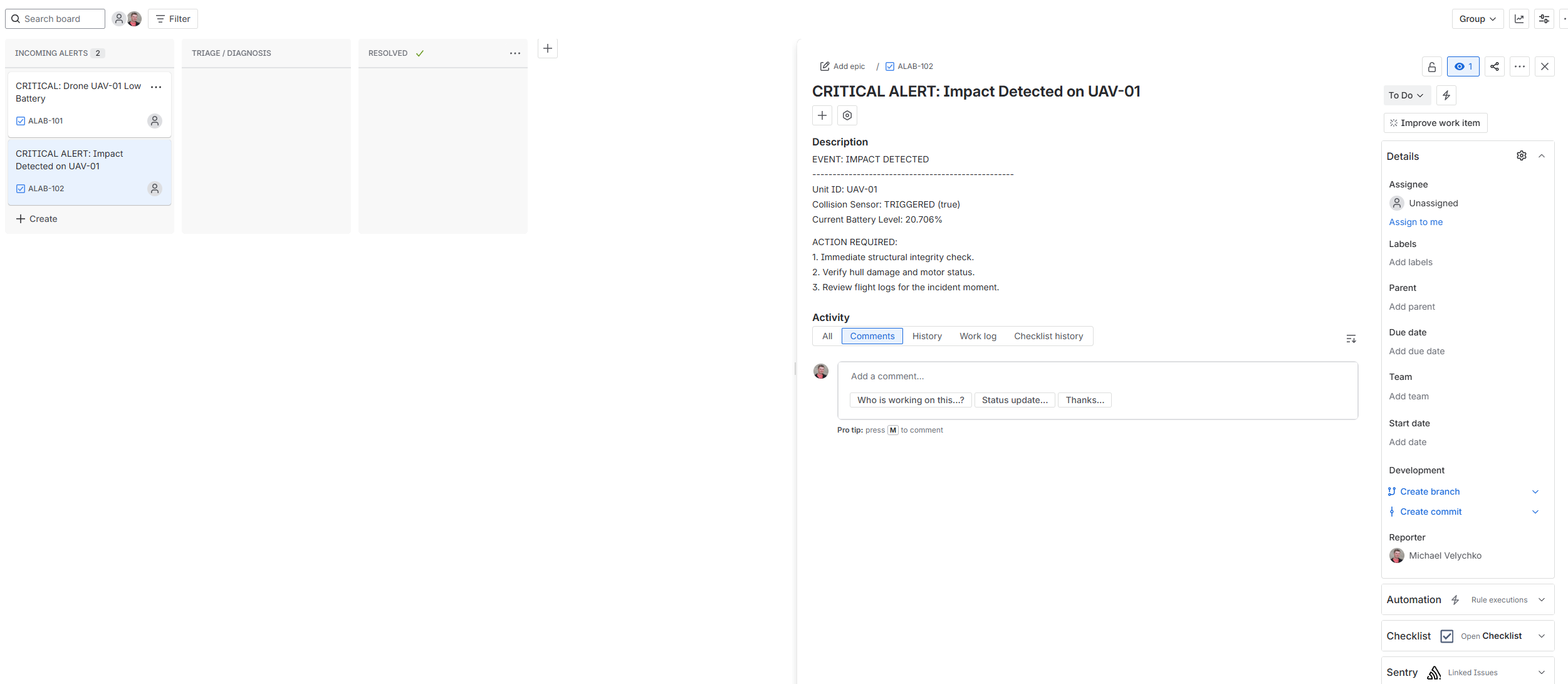
- Incident Management (Jira): Acts as the database and UI. Tickets are created programmatically via REST API, automatically assigning priority based on the event type.
Logic & Implementation: The system autonomously distinguishes between routine and critical states:
- Predictive Maintenance: Voltage drop <20% triggers a "Maintenance Request" (Low Priority).
- Critical Failure: Kinetic impact (Collision) triggers an immediate "Asset Loss" report (High Priority).
Battery Status: - demo video
Collision Event - demo video
The Value: This Low-Code/No-Code approach proves that complex telemetry pipelines can be deployed rapidly. By decoupling the simulation from the database, adding new telemetry events (e.g., "Signal Jamming") requires zero C++ code changes, ensuring high scalability.